行走機械人 (B3D1) 項目¶
這是什麼?¶
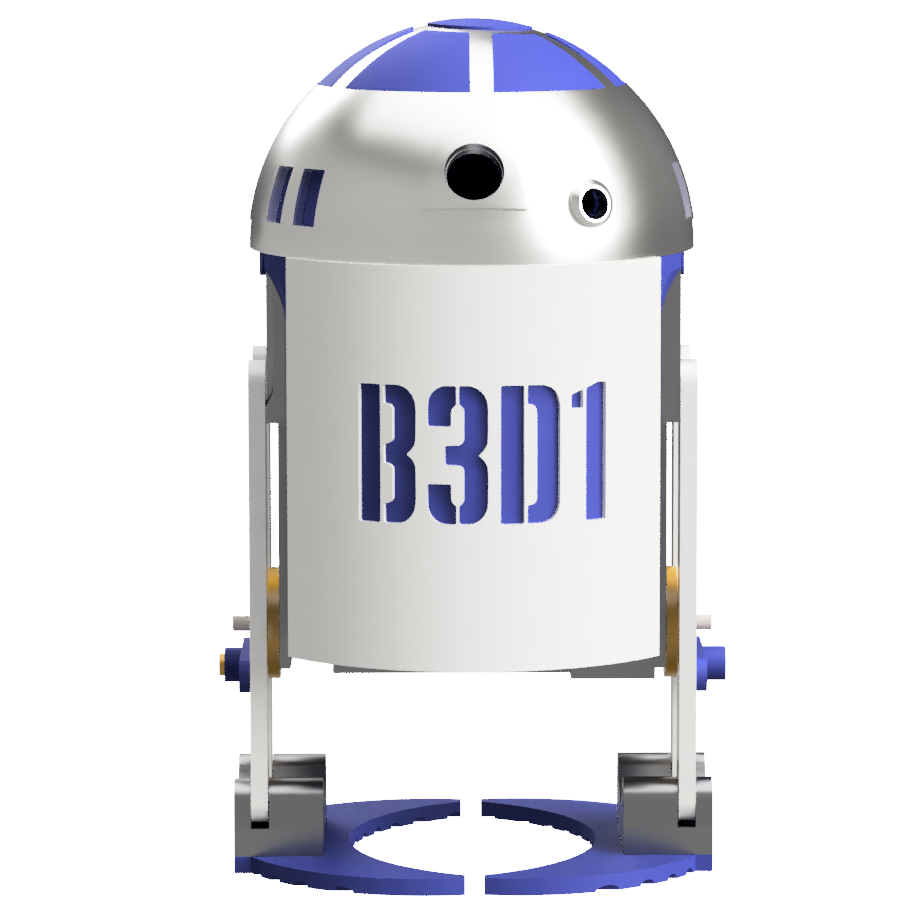
B3D1 這個名字可能會讓人想起 R2D2,但它實際上代表「Beets 3D1mension」,是對 Beets3D 這個創新公司及其團隊的致敬,該團隊在這個令人興奮的項目中發揮了重要作用。
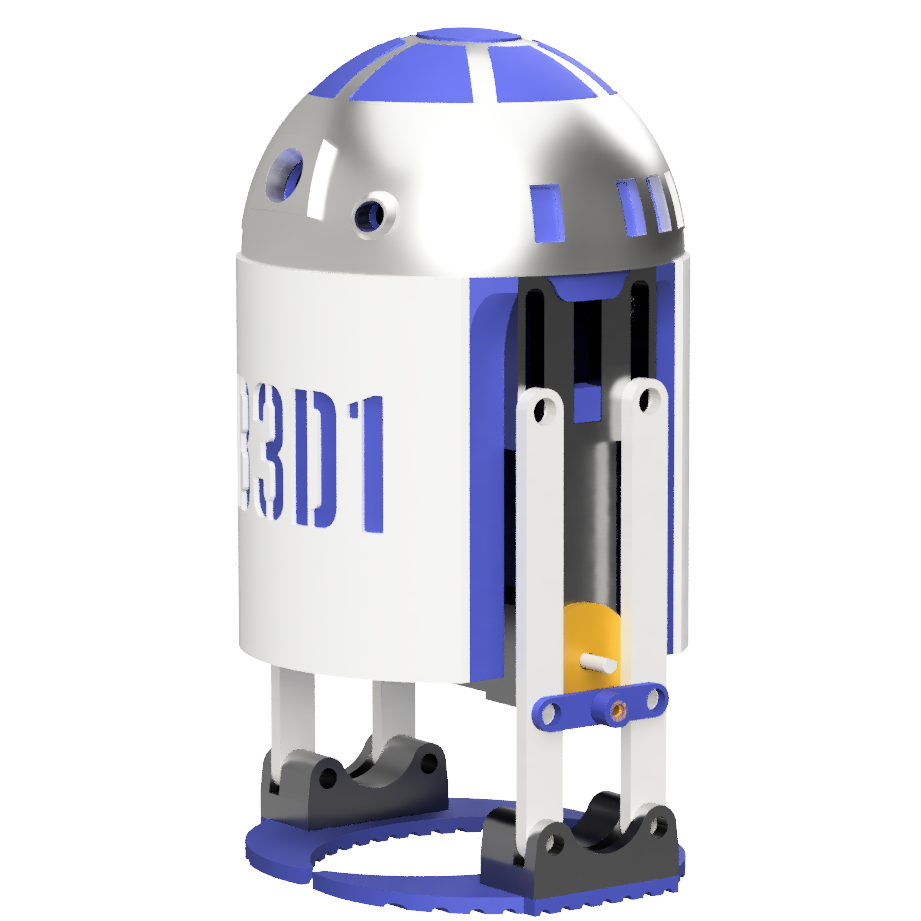

這個行走曲柄機械人作為基本行走機制概念的實際演示,通過引人入勝的實驗提供了一個教育平台,讓學生和教師探討各種物理特徵如何影響機械人的運動。通過使用 LEGO 積木改變腿長和腳設計等基本組件,學生可以探索:
- 行走速度和效率
- 機械人的穩定性和平衡
- 各種行走步態和模式
掌握行走機制、平衡和運動動力學的原則對於加深對機器人的理解至關重要。欲了解更多信息,請參閱 行走概念 頁面。
主要特點:
- 設計易於修改,配有可互換的部件
- 能夠向前行走,並具備向左或向右轉的能力
- 腳部附件可使用 LEGO 積木自定義,允許進行不同腿長和腳設計的實驗
- 配備遙控功能,嘗試各種行走模式
這個機械人作為一個強大的教育資源,使學習者能夠掌握基本的機械原則、機器人學的基礎概念,以及設計決策與運動性能之間的複雜聯繫。
你將學到什麼¶
- 機械原則:行走機制、平衡、運動動力學
- 設計與實驗:測試不同的腳部設計、腿長及其對機械人運動的影響
- 電子學:使用 micro:bit、馬達控制、基本電路
- 編程:編程控制機械人及遙控
- 工程學:理解齒輪系統、機械優勢
- 問題解決:分析運動模式、改善穩定性、優化性能
- 文檔編寫:記錄觀察結果,對比不同配置
- 團隊合作:協作實驗,分享發現
- STEM 整合:將物理概念與現實機器人應用相連接
你需要的東西¶
硬件
| 項目 | 描述 | 數量 | 必需/可選 |
|---|---|---|---|
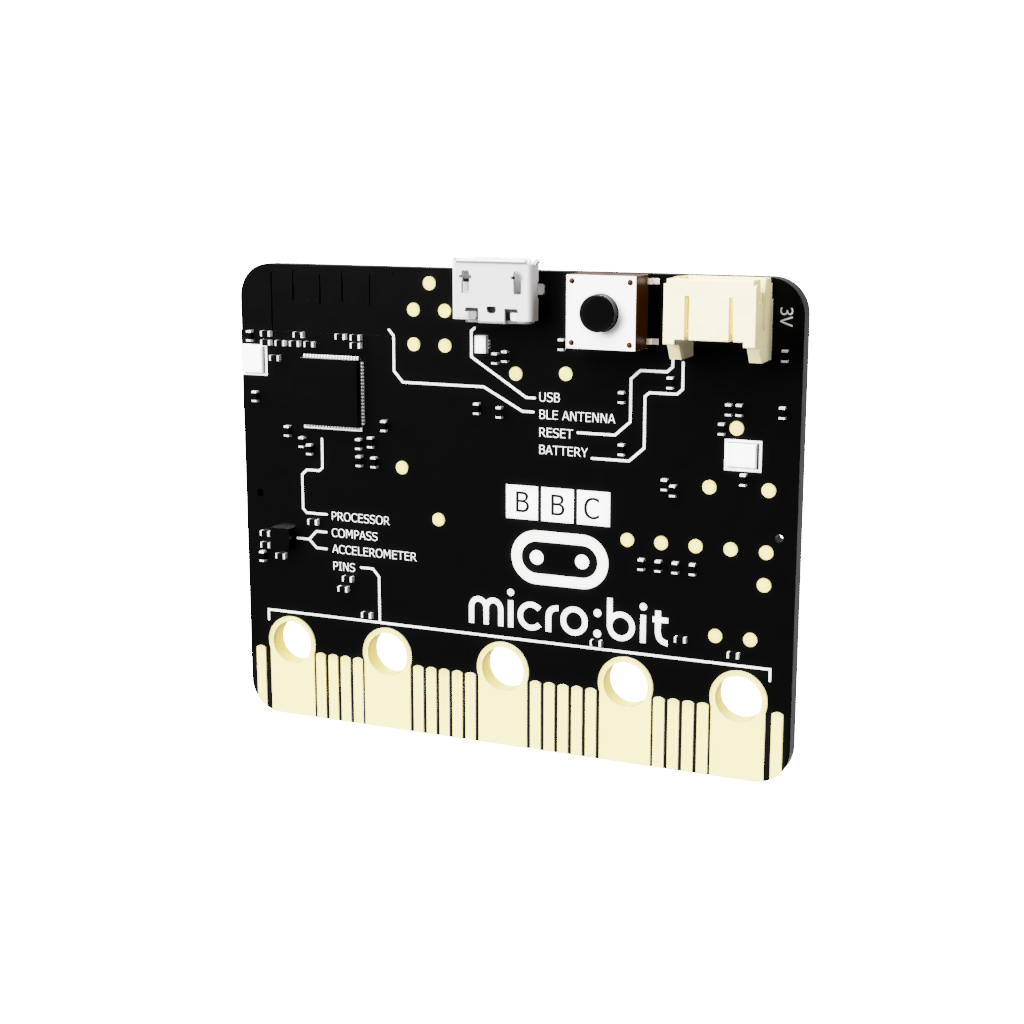
| BBC micro:bit | 用於控制機械人的緊湊型微控制器 | 2 | Y |
| 用於編程的 USB 線 | 用於編程 micro:bit 的電纜(本項目使用 V2) | 1 | Y |
| 主控制板 | 用於連接 micro:bit 的板,包括馬達驅動器和電池包 | 1 | Y |
| AAA 電池 | 機械人的電源 | 4 | Y |
| 齒輪馬達 (N20 DC 馬達) | 提供運動所需的扭矩和速度的馬達 | 2 | Y |
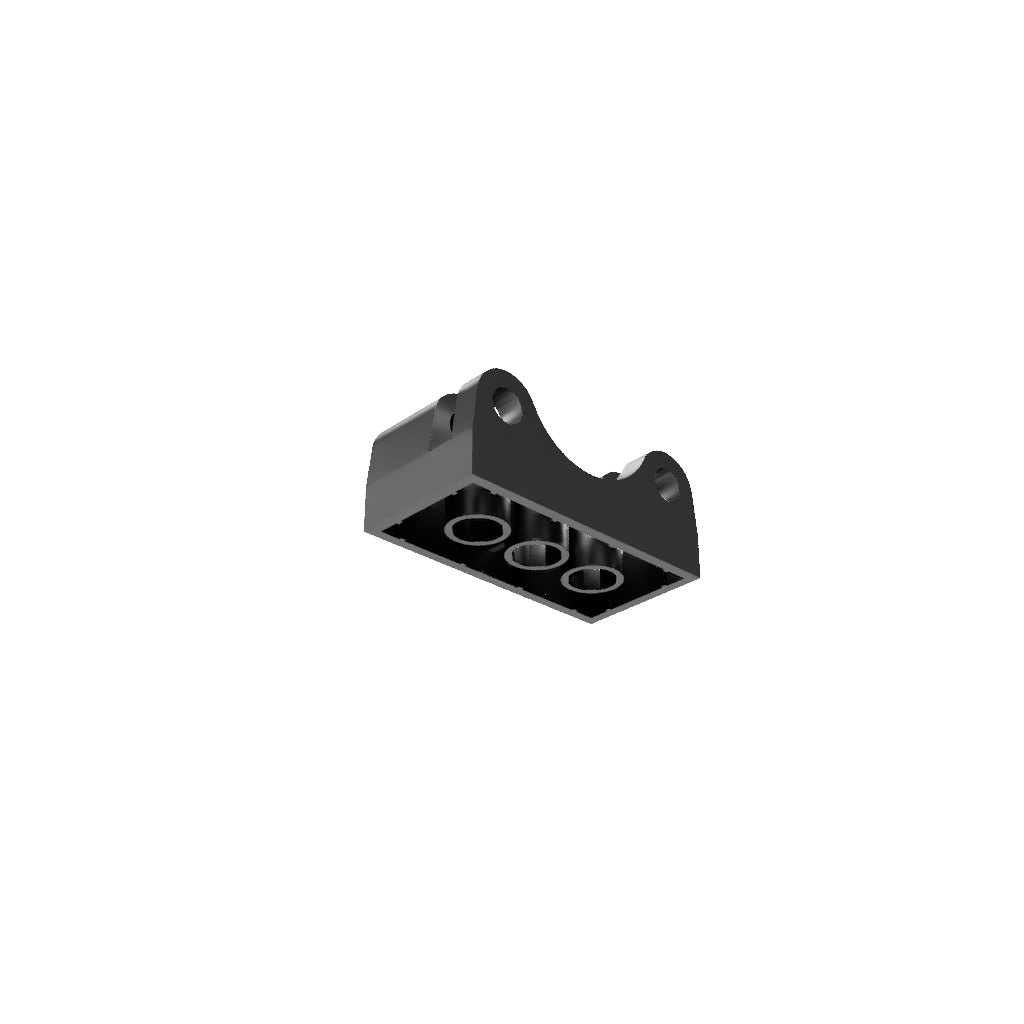
| 3D 打印部件 | 底盤和機械部件(鏈接到 STL 文件) | 各種 | Y |
| 外殼部件 | 機械人的外部外殼 | 各種 | Y |
| 螺絲 M4X10 | 用於組裝的螺絲 | 8 | Y |
| 螺絲 M4X5 | 用於組裝的螺絲 | 4 | Y |
| 螺絲 M2 | 用於組裝的小螺絲 | 2 | Y |
| LEGO 積木 | 用於修改和自定義 | 各種 | N |
軟件
| 項目 | 描述 | 必需/可選 |
|---|---|---|
| MakeCode for micro:bit | 基於網頁的編程平台或使用 iPad 應用 | Y |
| 行走機械人的主要代碼 | 代碼鏈接 | Y |
| 遙控器的代碼 | 代碼鏈接 | Y |
| 3D 打印軟件 | 用於自定義部件,建議使用 Fusion 360 | N |
工具
| 項目 | 描述 | 必需/可選 |
|---|---|---|
| 螺絲刀 | 用於組裝和拆卸部件的工具 | Y |
| 電線剪/剝線鉗 | 用於剪切和剝去跳線的工具 | Y |
| 3D 打印機訪問 | 用於打印 3D 模型的 3D 打印機 | N |
如何運作¶
設計¶
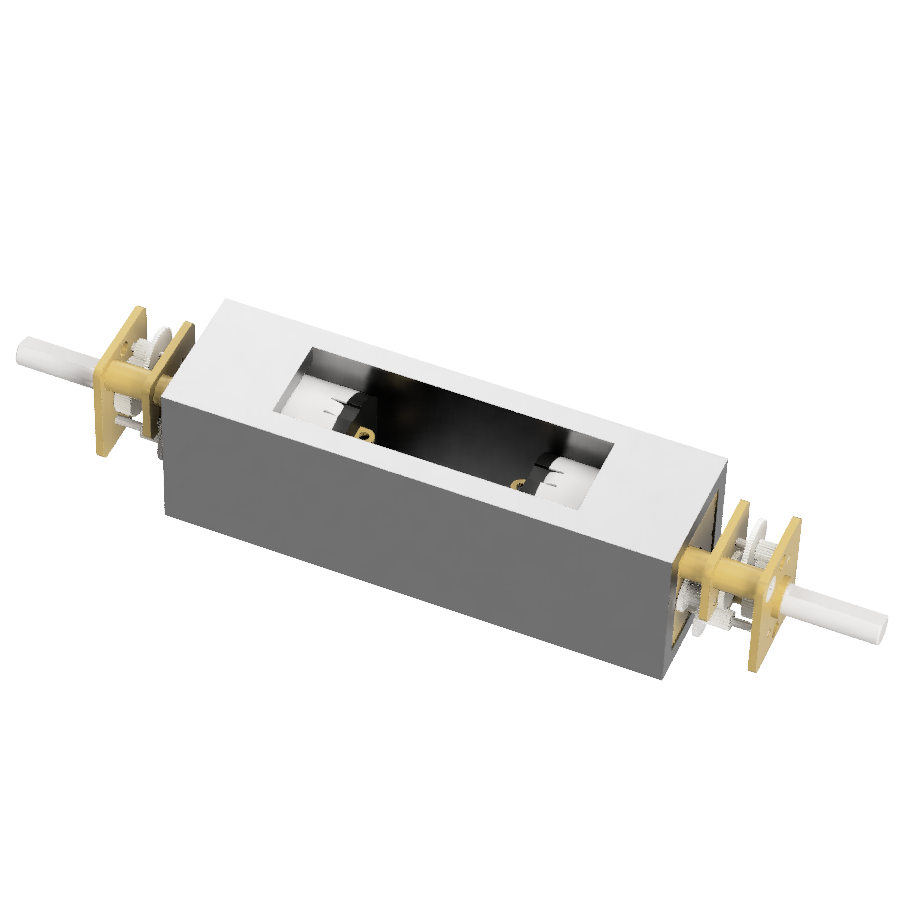
核心行走機制
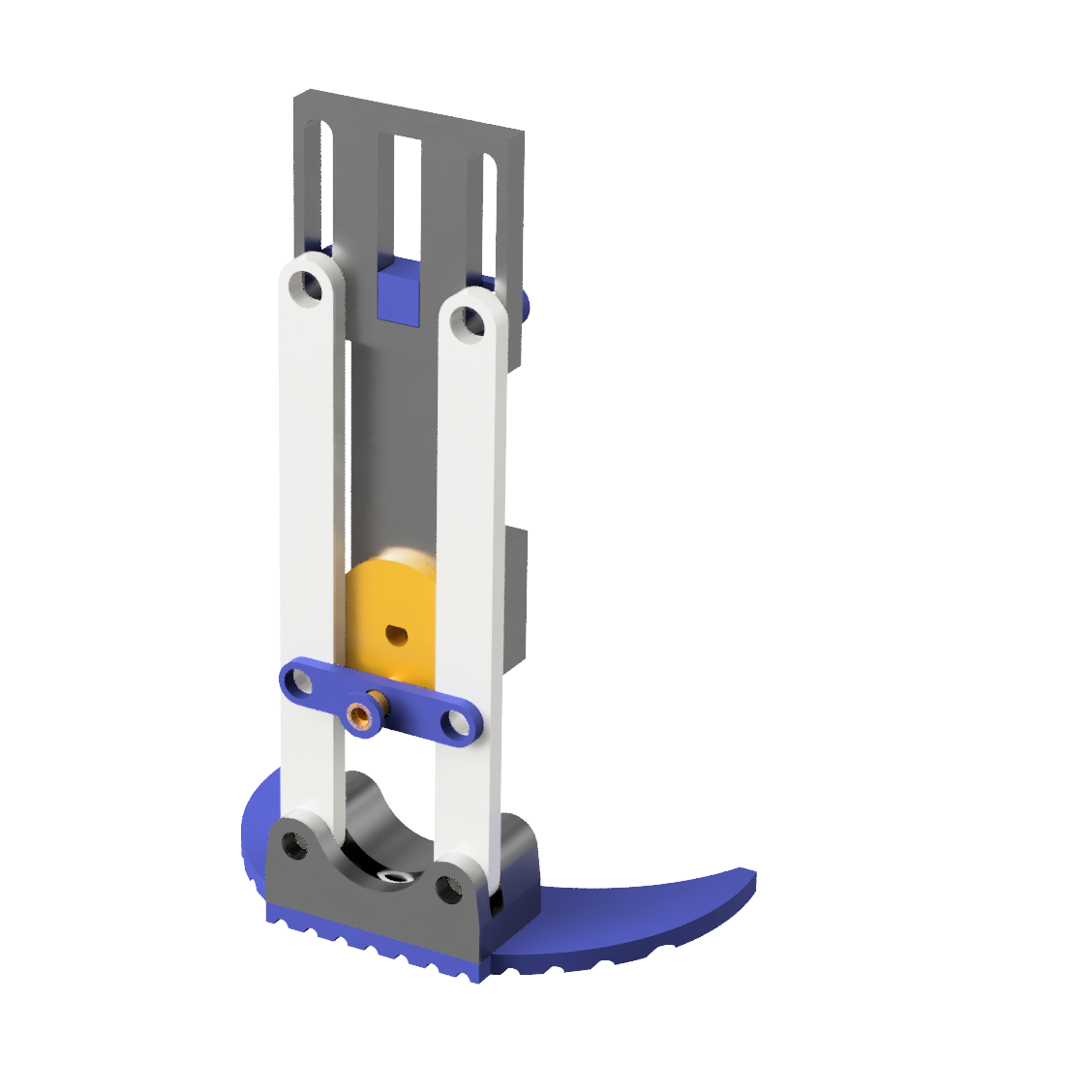
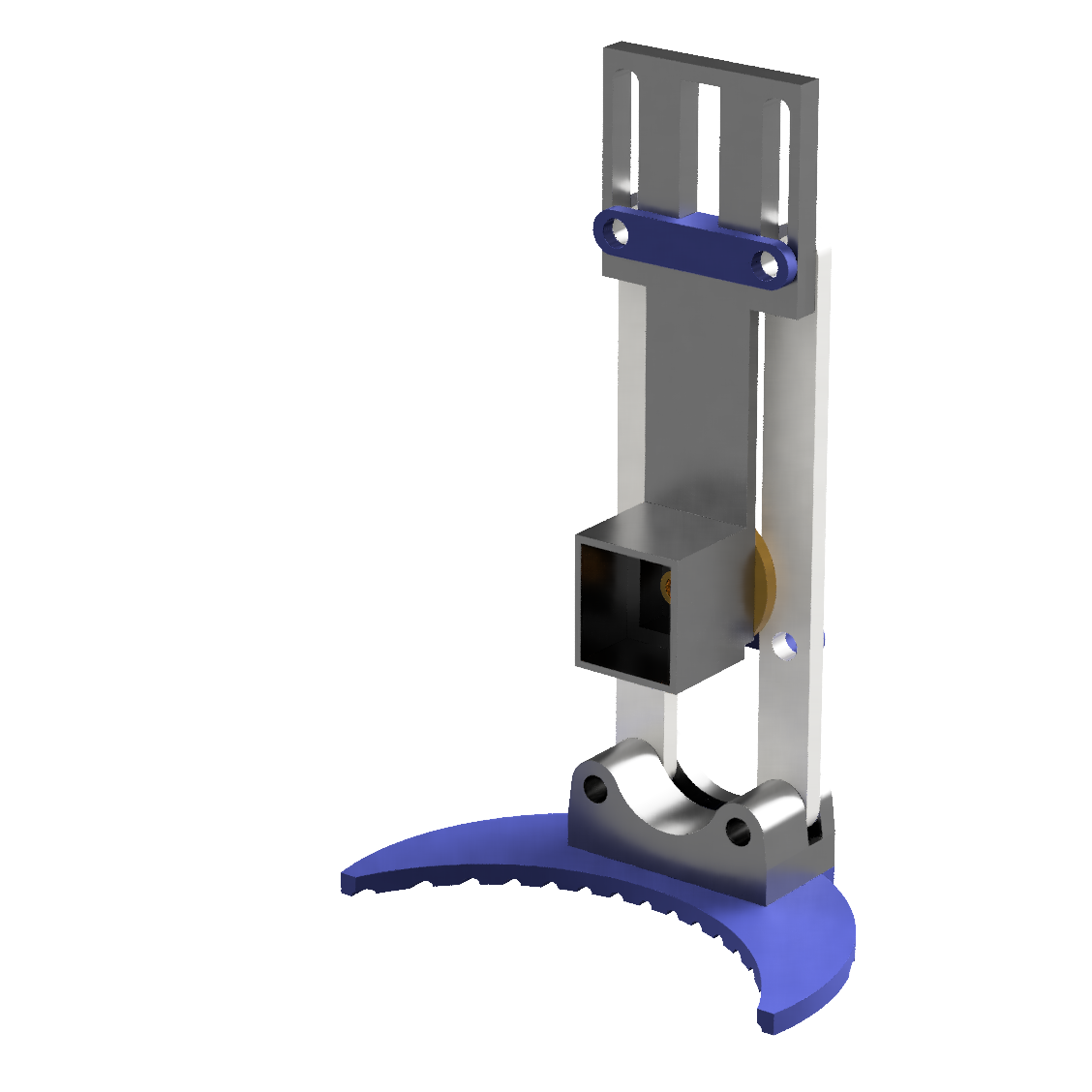
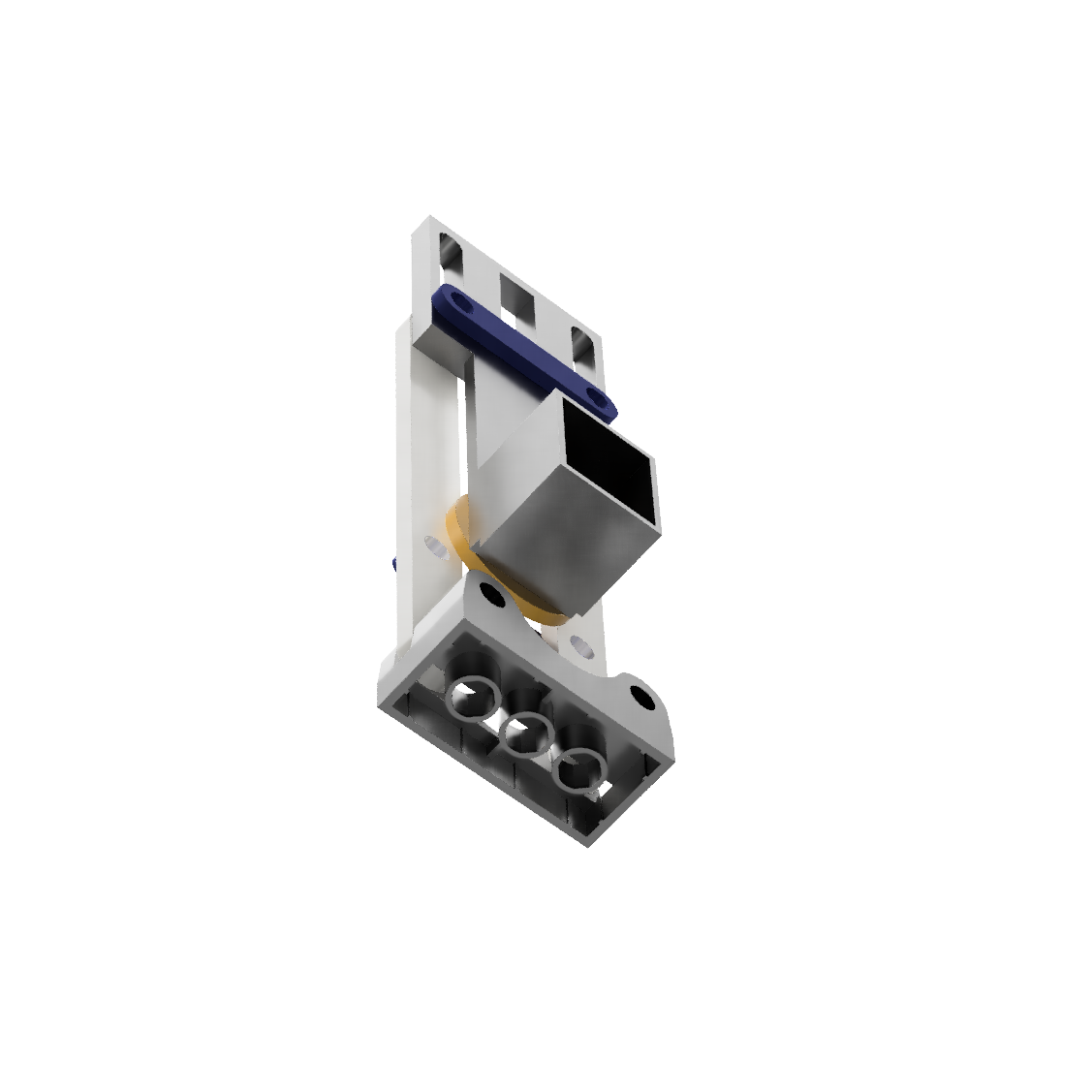
- 馬達單元 - 由 2 個齒輪馬達組成,提供機械人運動所需的扭矩和速度。這些馬達的位置經過精心設計,以優化行走機制,實現平穩和協調的腿部運動。齒輪設計提高了動力傳輸的效率,確保機械人能夠有效地在各種地形上行駛。
- 腿(左/右) - 由一個模擬擺動行走的機制組成。這種設計使腿部能夠平穩地前後移動,模仿人類腿部的行走。腳部包括一個兼容 LEGO 的附件,便於自定義和更改腳部設計。這一特性鼓勵對不同形狀和大小的實驗,以觀察它們如何影響機械人的運動和平衡。
電子學 - 主板 - 作為機械人的中央樞紐,設有專用插槽供 micro:bit 單元使用,作為大腦。它集成了馬達驅動器,並促進了馬達和電池包之間的無縫連接,確保高效的電力分配和控制。
-
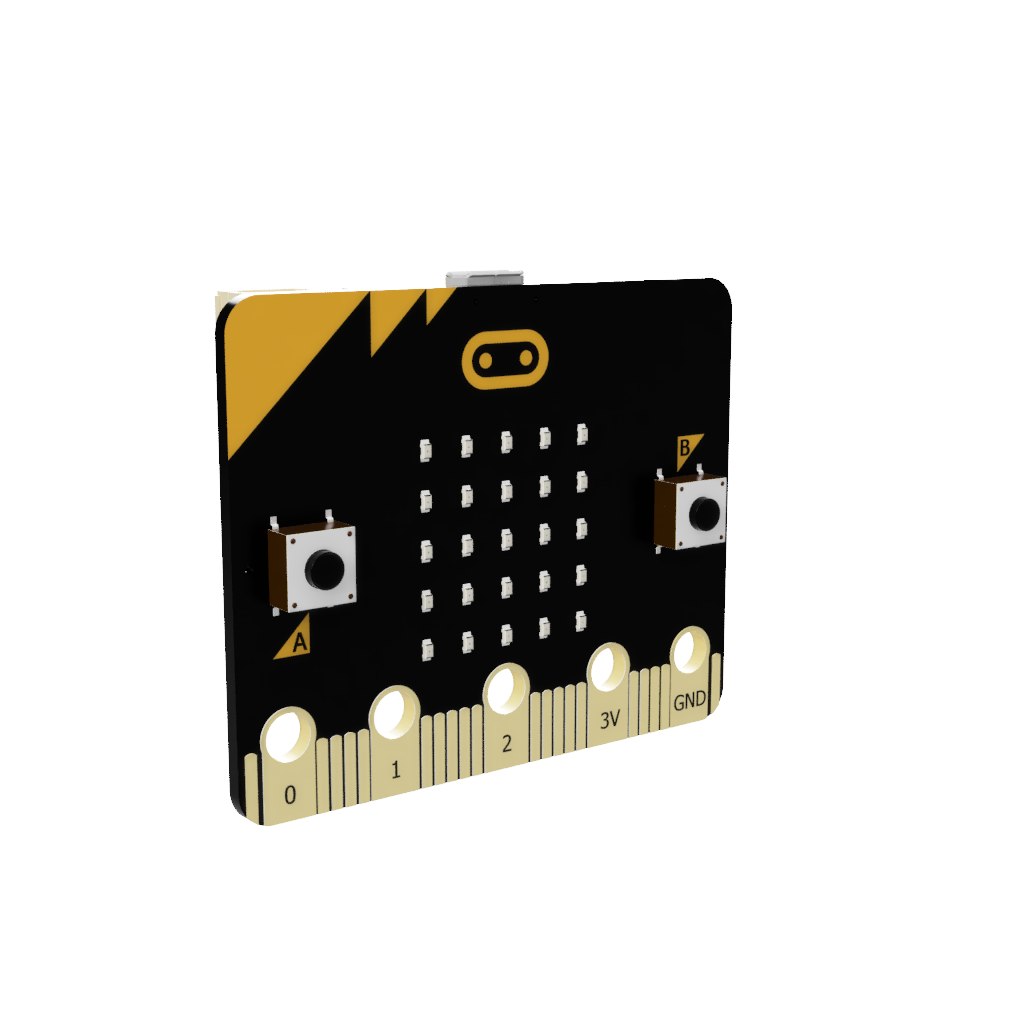
Micro:bit - Micro:bit 是一款緊湊且多功能的微控制器,旨在用於教育目的。它配備了一系列傳感器、按鈕和 LED 燈,非常適合編程和機器人項目。在這個機械人中,Micro:bit 作為大腦,控制馬達並處理用戶的輸入。
-
電池盒 - 電池盒設計用於安全地容納機械人的電源,確保電池受到保護並易於更換。設計良好的電池盒有助於機械人的整體穩定性,保持低重心,這對於有效的行走至關重要。適當的重量分配有助於防止翻倒,增強機械人在運動過程中的平衡。
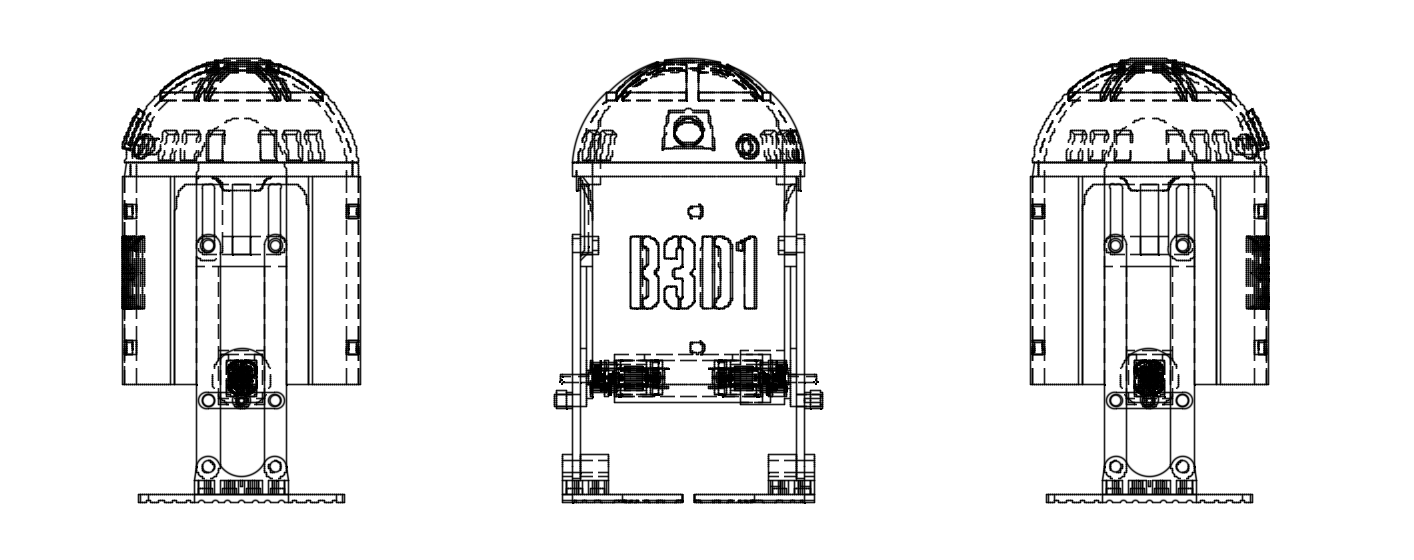
外殼
- 機身- 這是行走機械人的主要機身,旨在容納內部組件並為腿部和頭部提供結構支持。

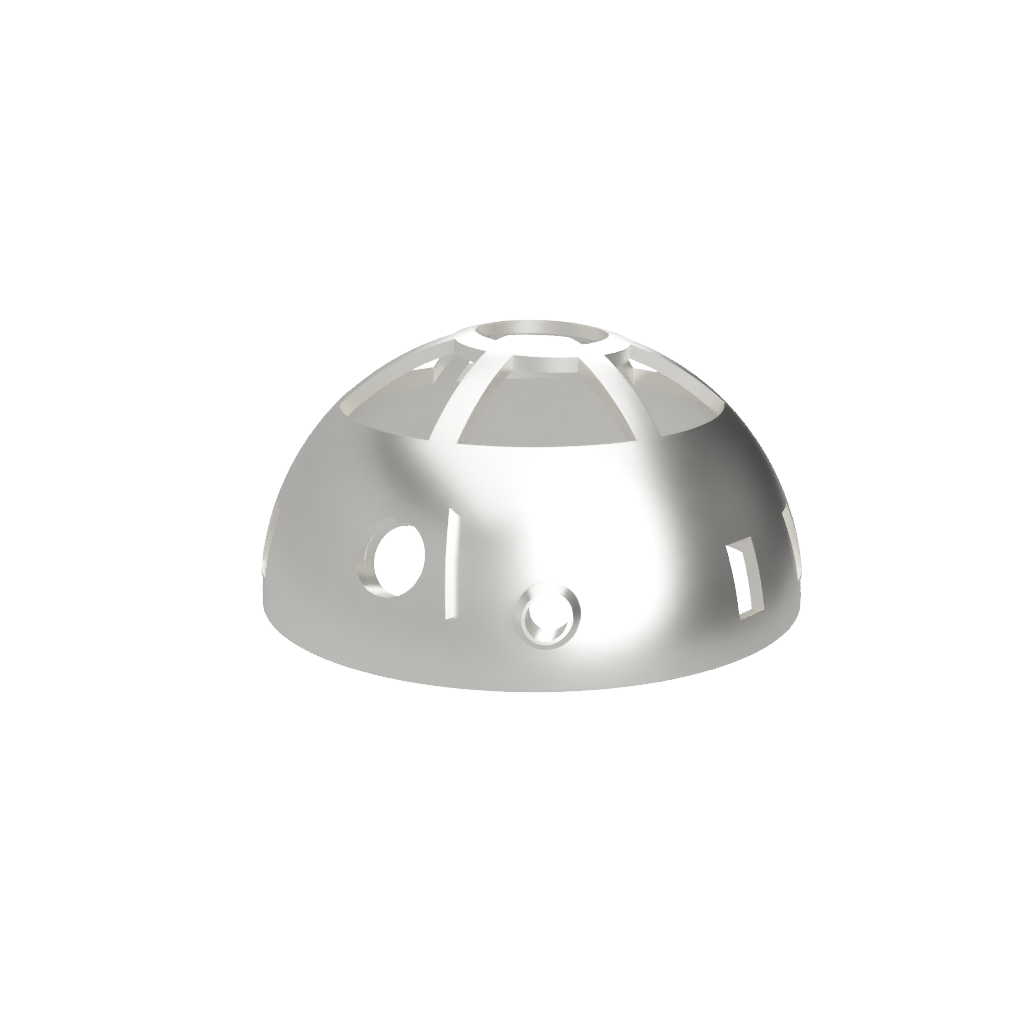
- 頭部 - 此組件作為機械人的頭部,提供視覺表示並容納任何必要的傳感器或互動功能。這可以根據學習需求進行自定義。
- 外殼 - 此組件為機械人提供外部外殼,提供良好的外觀並根據需求進行自定義。

遙控 您可以使用另一個 Micro:bit 來控制行走模式,通過按下 A 或 B 按鈕。每個按鈕對應一條腿的運動;按下按鈕將使相關的腿向前邁步。例如,假設 A 按鈕控制左腿,B 按鈕控制右腿。當您按下 A 按鈕時,左腿將向前邁步;當您按下 B 按鈕時,右腿將向前邁步。這種設置使您能夠管理兩條腿的運動時間和動作,提供了一個探索「控制時間」如何影響行走過程中的平衡、速度和方向的機會。
自定義選項
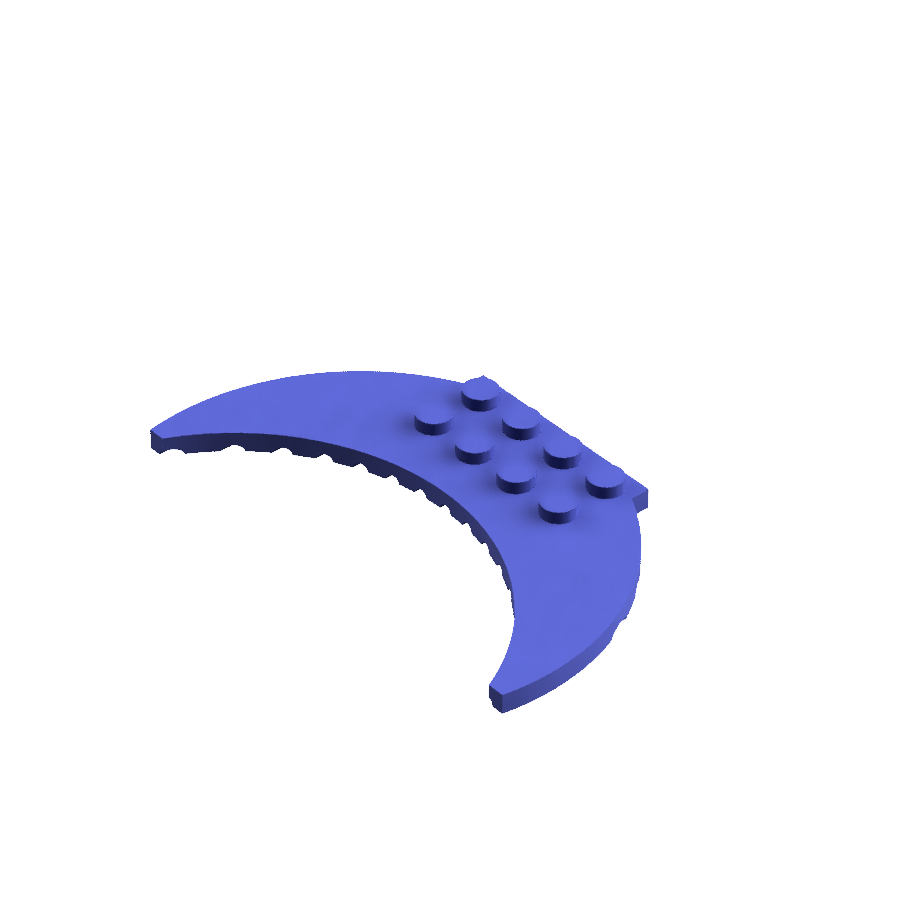
- LEGO 附件 - 腳部設計允許添加任何 LEGO 附件

- 可調腿長 - 通過 LEGO 附件,您可以通過添加 LEGO 積木來調整腿的長度,這將改變每一步的運動範圍。
- 可調腳形 - 您還可以設計任何形狀以測試不同的行走行為,考慮到平衡。
組裝指南¶
有關詳細的組裝說明,請參閱 組裝指南。
課程計劃¶
課程目標:¶
- 理解行走機制(平衡、扭矩、步態模式)。
- 使用 B3D1 套件設計和建造一個功能性行走機械人。(可選)
- 整合編程(micro:bit)以進行馬達控制和遙控操作。(可選)
- 實驗修改以優化性能。
- 通過迭代測試和文檔編寫來培養問題解決能力。
課程結構¶
總課時:10 節核心 + 4 節可選 每節時長:40–60 分鐘
目標 1:理解行走機制(平衡、扭矩、步態模式)¶
- 第 1 節:生物力學基礎
- 練習: 步態圖示 – 使用人形動畫比較人類/昆蟲的步態。
- 時長: 50 分鐘
- 對應: 平衡、步態模式。
有關詳細信息,請參閱 練習:步態圖示
- 第 2 節:扭矩與平衡
- 練習: 翹翹板測試 – 使用 LEGO 重量調整機械人在支點上的平衡。
- 時長: 50 分鐘
- 對應: 扭矩、平衡。
有關詳細信息,請參閱 練習:翹翹板測試
目標 2:設計與建造 B3D1 機械人(可選 🔧)¶
- 第 3 節:機械組裝與電子設置
- 練習: 齒輪箱中繼與電路偵探 – 團隊組裝齒輪系統,專注於扭矩傳輸,並診斷接線錯誤(例如,馬達連接鬆動)。
- 時長: 60 分鐘
有關詳細信息,請參閱 組裝指南
目標 3:整合編程(可選 🔧)¶
- 第 4 節:馬達控制基礎
- 練習: 步數計數器 – 編程機械人向前/向後走 10 步。
-
時長: 60 分鐘
-
第 5 節:遙控
- 練習: 迷宮導航者 – 編寫遙控代碼,駕駛機械人通過簡單的路徑。
- 時長: 50 分鐘
目標 4:實驗修改¶
- 第 6 節:優化實驗室
- 練習: 腳部更換挑戰 – 在不同表面上測試 LEGO 腳部。
- 時長: 50 分鐘
-
對應: 修改、性能。
-
第 7 節:重量與速度的權衡 (可選 🔧)
- 練習: 負載測試 – 向機械人添加重量並測量速度減少。
- 時長: 50 分鐘
目標 5:培養問題解決能力¶
- 第 8 節:除錯工作坊 (可選 🔧)
- 練習: 破壞與修復 – 引入設計缺陷(例如,腿部不對齊)讓團隊進行故障排除。
-
時長: 60 分鐘
-
第 9 節:最終項目
- 練習: 機械人奧林匹克 – 優化機械人以完成自定義任務(例如,爬坡)。
- 時長: 60 分鐘
可選路徑
- 建造與編碼路徑(第 3–6 節): 適合建造完整套件的學生。
- 僅實驗路徑(第 7–10 節): 使用預製機械人專注於測試/文檔編寫。
靈活性說明:
- 無套件選項: 用虛擬模擬(例如,Tinkercad)替代 B3D1 組裝。
- 評估: 使用實驗日誌(目標 5)來評估迭代問題解決能力。
這一結構確保了對機械原理、實驗和問題解決的核心關注,而可選課程則讓您根據不同小組的需求調整深度。