組裝指南¶
本指南將帶您完成步行機器人的組裝過程。組裝分為三個主要部分:
- 機械組裝:包括所有物理組件,如馬達、腿部、主板和遙控器。
- 編程:使用 Micro:bit 設置機器人和遙控器的軟件。
- 測試和校準:指導您測試組裝好的機器人並校準其動作以獲得最佳性能。
讓我們從機械組裝開始。
1. 機械組裝¶
1.1 馬達模組安裝¶
涉及的部件:
| 項目 | 描述 | 數量 | 圖片 |
|---|---|---|---|
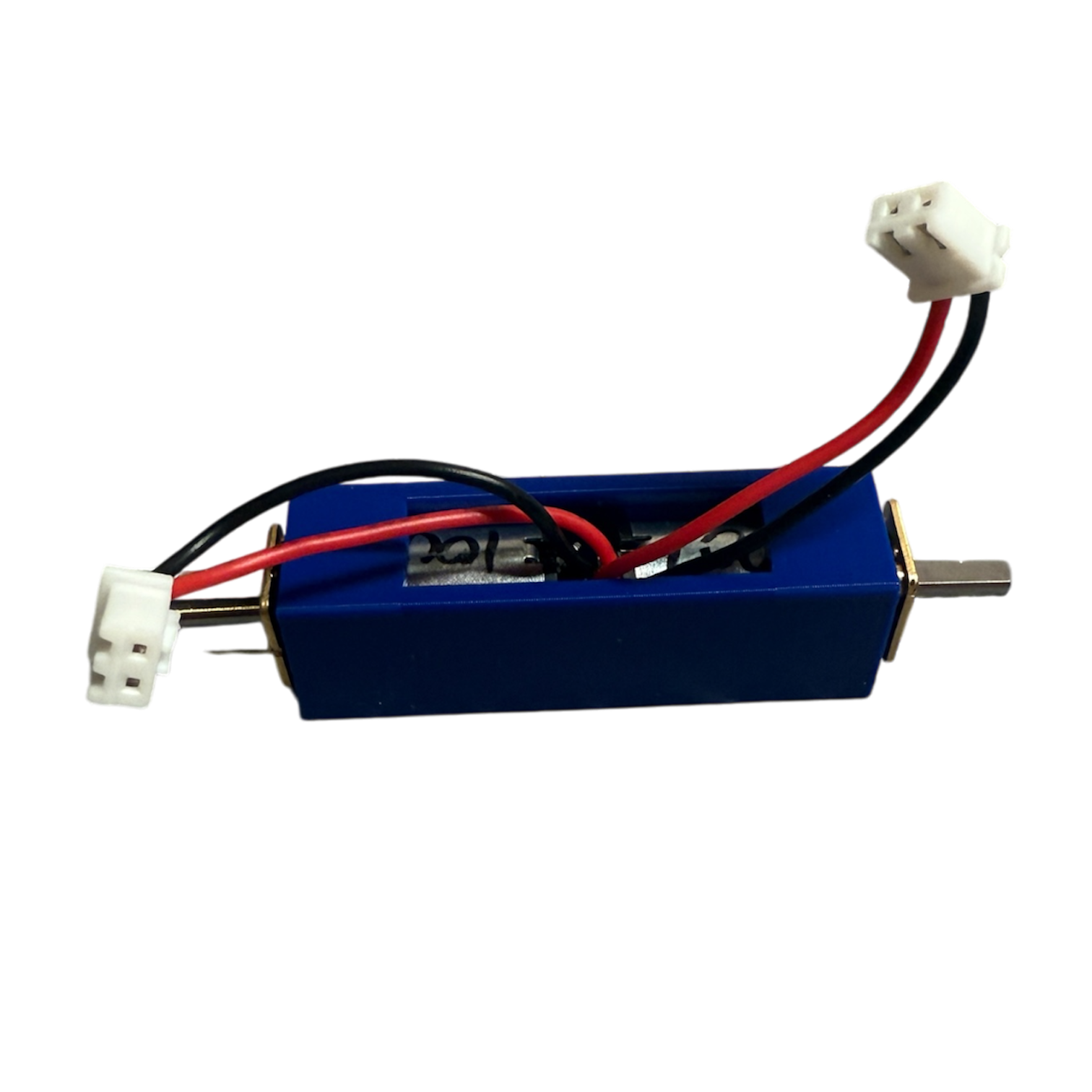
| 馬達 (N20 DC 馬達 6V 60rpm) | 用於驅動的小型直流馬達 | 2 | 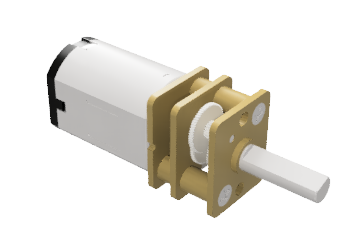 |
| part-motor-case.stl | 馬達的外殼 | 1 |  |
視頻說明
1.2 左右腿組裝¶
涉及的部件:
| 項目 | 描述 | 數量 | 圖片 |
|---|---|---|---|
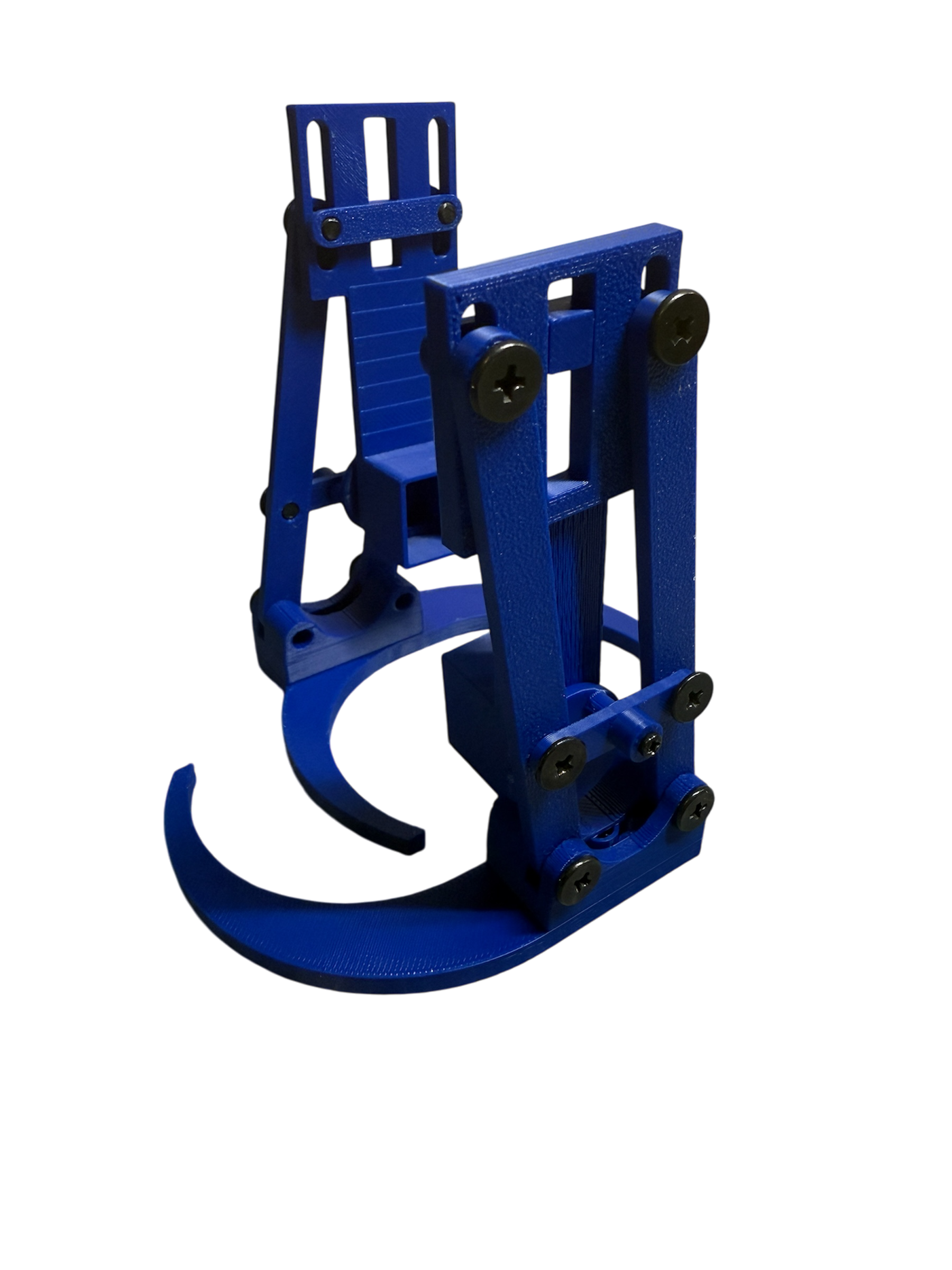
| part-frame.stl | 主要機身組件 | 2 | 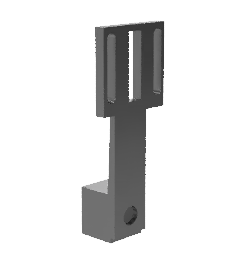 |
| part-control-bar-bottom.stl | 控制桿(底部)組件 | 2 | 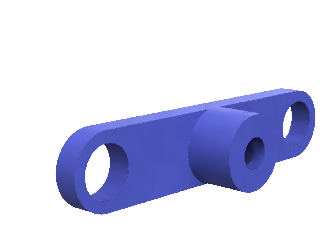 |
| part-control-bar-top.stl | 控制桿(頂部)組件 | 2 |  |
| part-foot.stl | 腳部組件 | 2 | 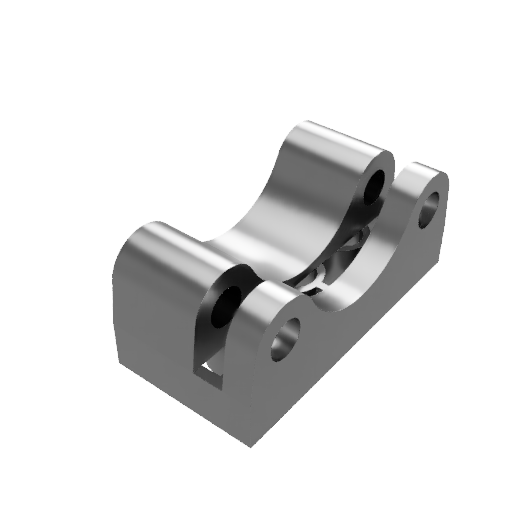 |
| part-foot-palm.stl | 腳掌組件 | 2 | 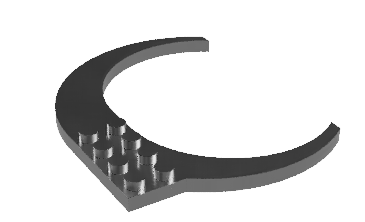 |
| part-foot-sole.stl | 腳底組件(可選) | 2 |  |
| part-leg-main.stl | 腿部主要組件 | 2 |  |
| part-gear.stl | 齒輪組件 | 2 | 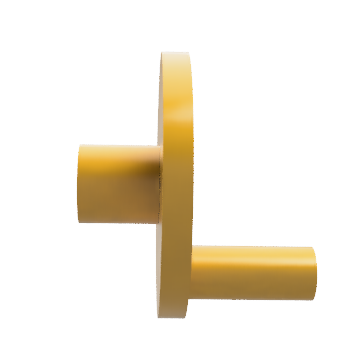 |
| part-screw-M4x5 | M4X5 螺絲 | 4 |  |
| part-screw-M4x10 | M4X10 螺絲 | 8 |  |
| part-gear.stl | 小螺絲 | 2 |  |
視頻說明
- 請重複組裝兩次。
1.3 主框架和主板安裝¶
涉及的部件:
| 項目 | 描述 | 數量 | 圖片 |
|---|---|---|---|
| part-main-frame.stl | 主要機身組件 | 1 | 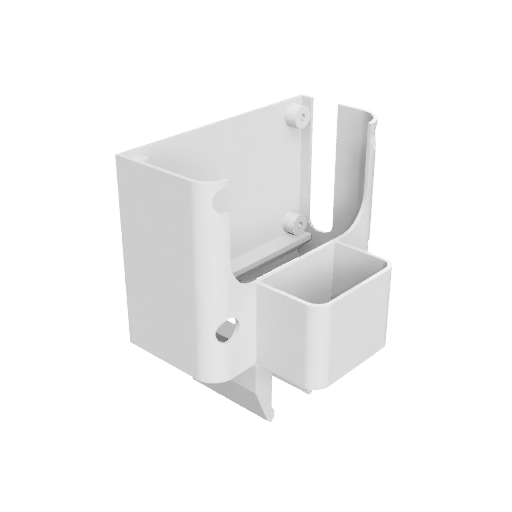 |
| part-battery-case | 電池盒 | 2 | 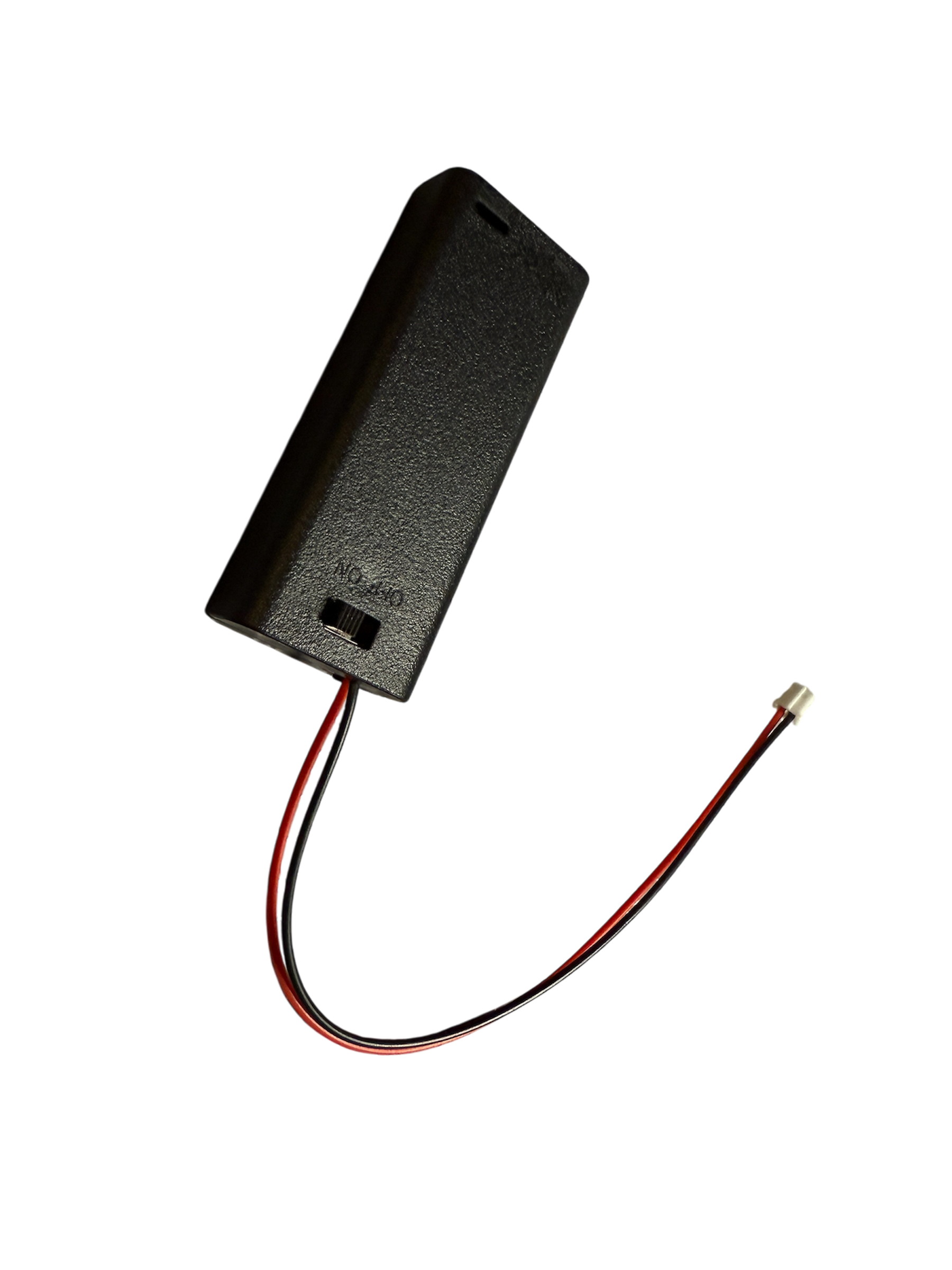 |
| micro:bit | Micro:bit | 1 |  |
| Beets 控制板 | 整合所有電子元件的控制板 | 1 |  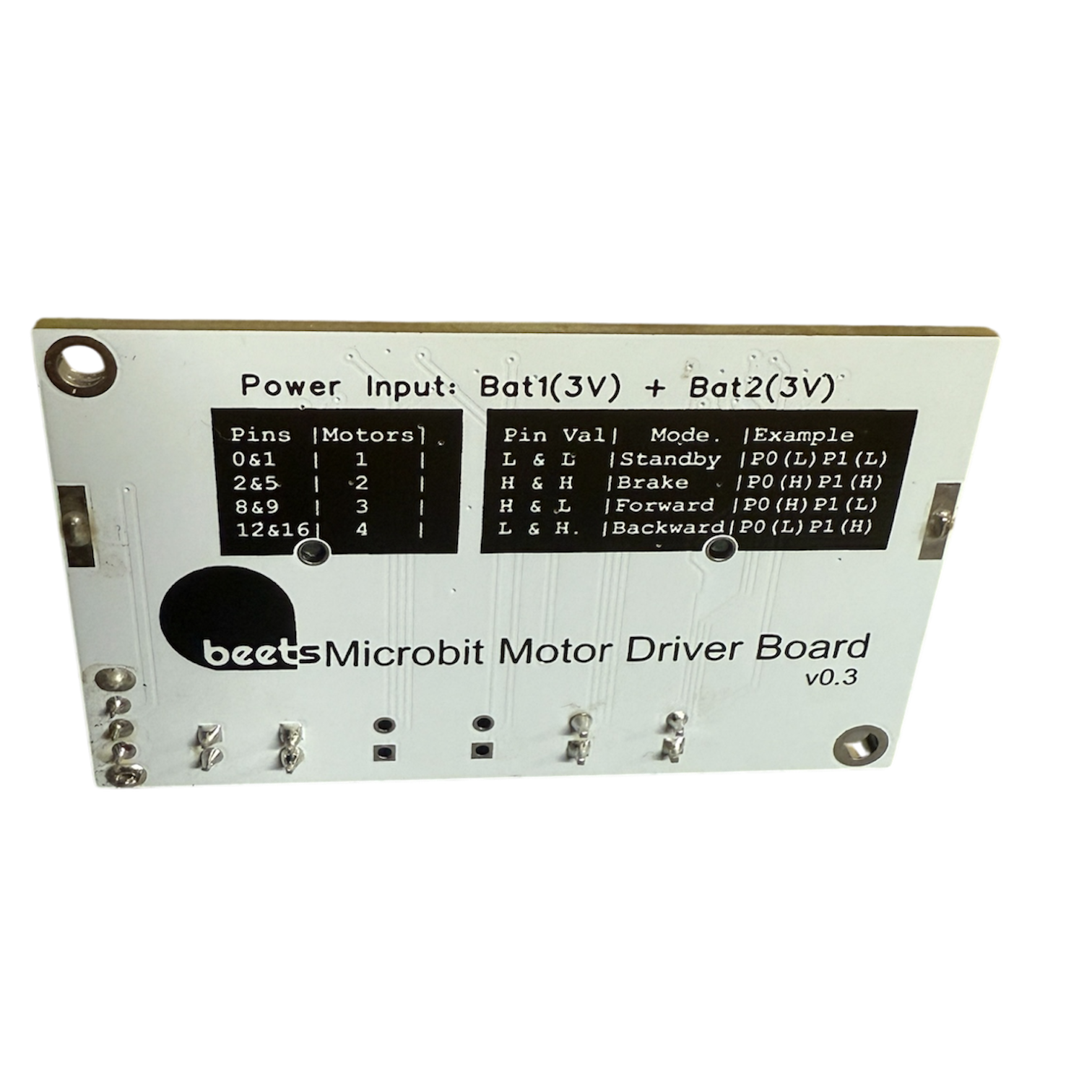 |
| 腿部組件 | 1.2 節的腿部組裝 | 1 | |
| 馬達模組 | 1.1 節的馬達模組組裝 | 1 | |
視頻說明
1.5 機身和外殼¶

涉及的部件:
| 項目 | 描述 | 數量 | 圖片 |
|---|---|---|---|
| part-body.stl | 主要機身組件 | 1 |  |
| part-head.stl | 頭部組件 | 1 | 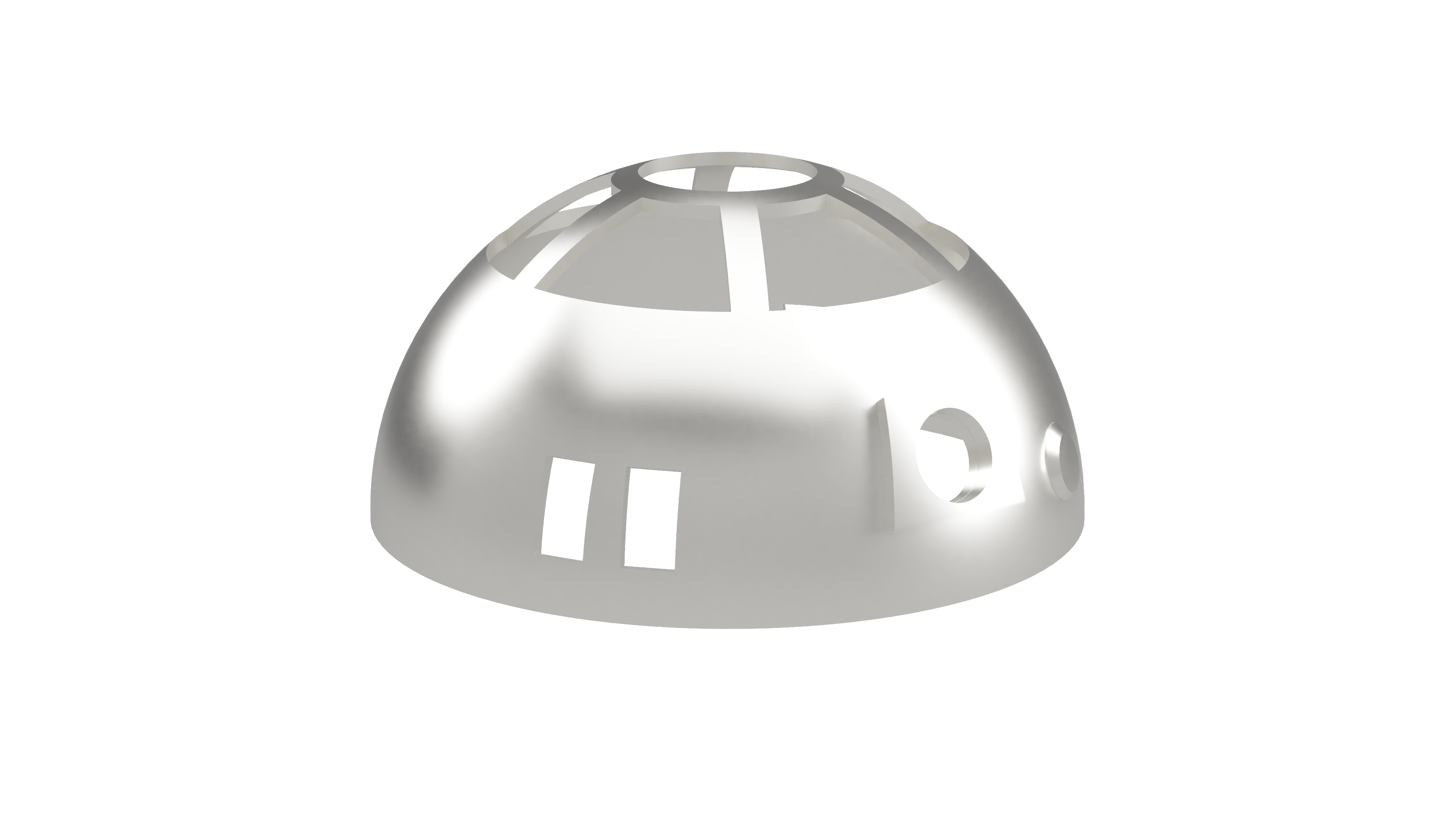 |
| part-shell-front.stl | 前殼組件 | 1 | 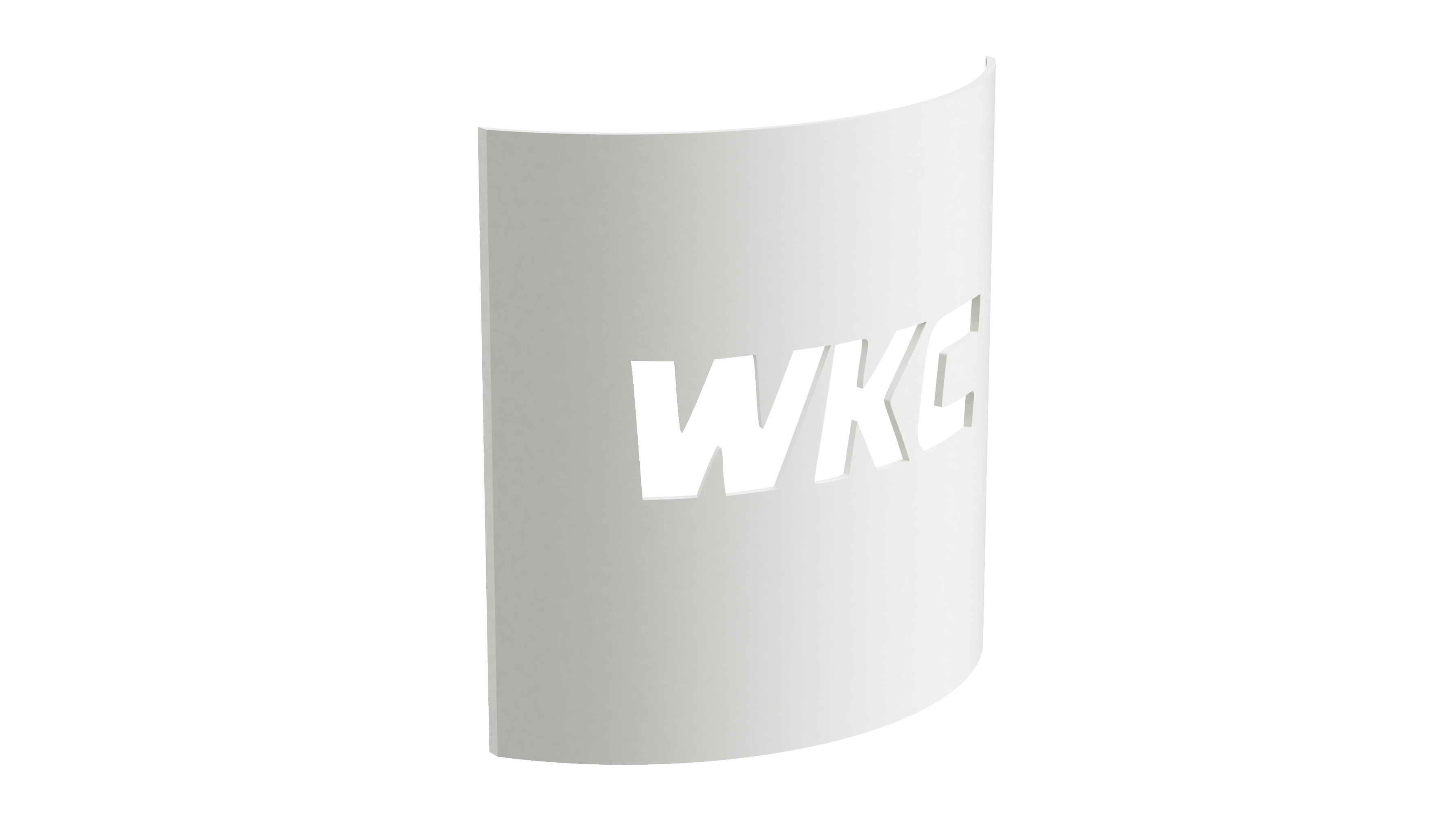 |
| part-shell-back.stl | 後殼組件 | 1 |  |
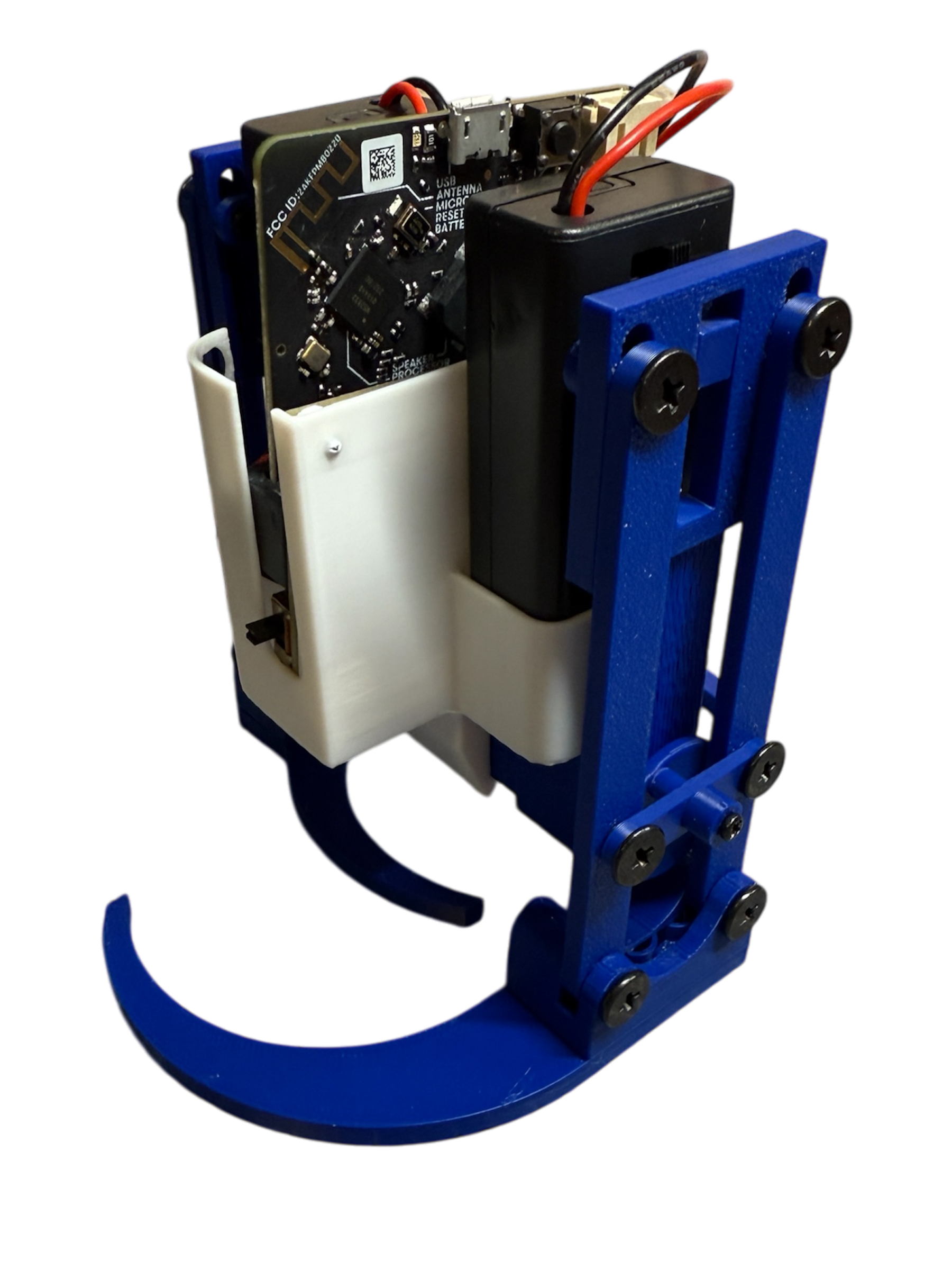
| component-main-frame | 上一節組裝的主框架組件 | 1 | |
視頻說明
1.7 遙控器¶
涉及的部件:
| 項目 | 描述 | 數量 | 圖片 |
|---|---|---|---|
| part-controller-main.stl | 主要機身組件 | 1 | 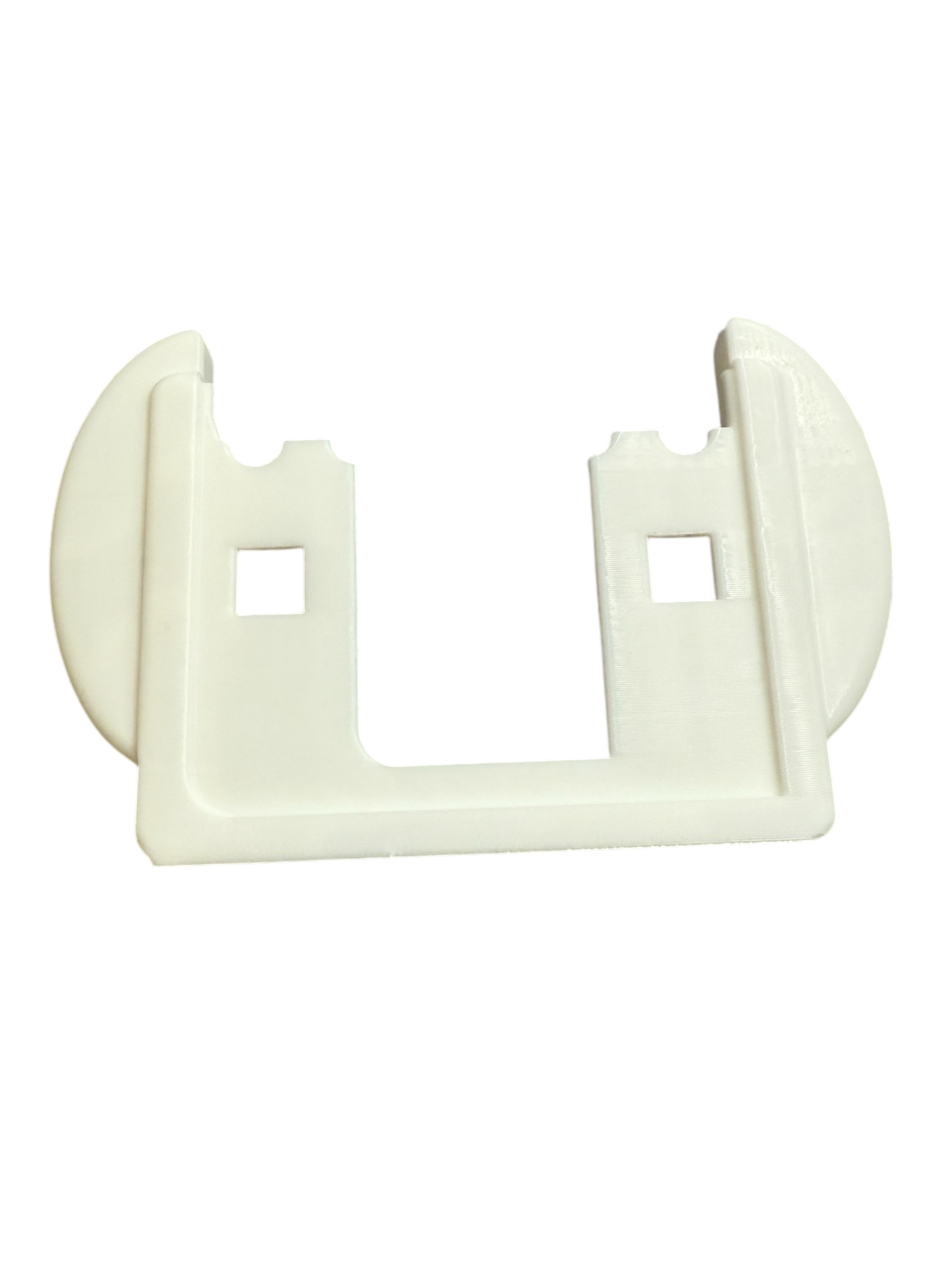 |
| part-controllor-battery.stl | 電池盒支架 | 1 |  |
| part-battery-case | 電池盒 | 1 | |
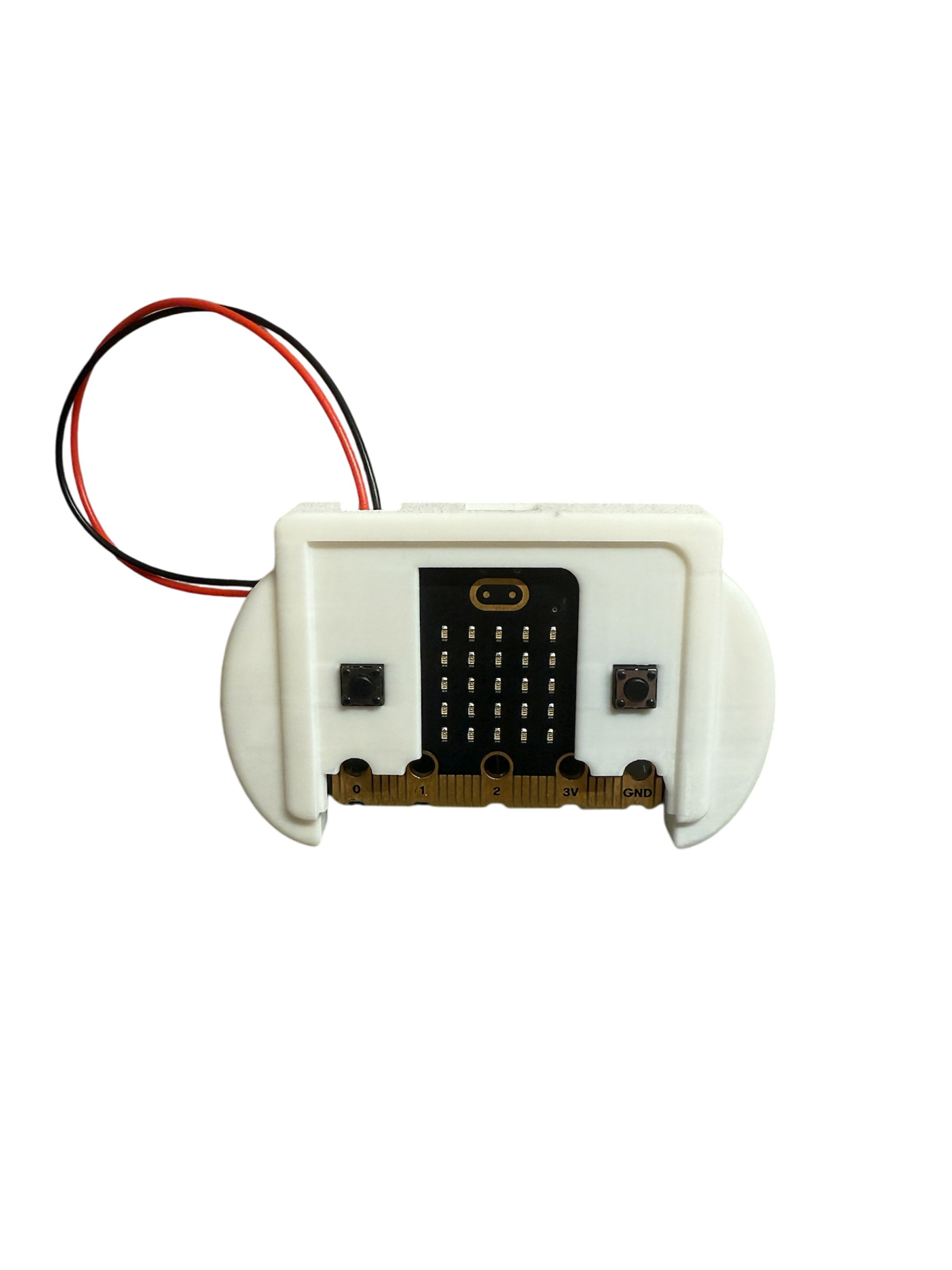
| part-microbit | microbit | 1 | |
您可以從此連結下載 stl 文件 在此下載 stl 文件
視頻說明
2. 編程¶
在本節中,您將使用 Microsoft MakeCode。
- 可以通過 https://makecode.microbit.org/# 訪問
- 您需要註冊一個帳戶
獲得帳戶後,請繼續下一步。

2.1 使用 MakeCode 進行基本的 Micro:bit 編程¶
- 點擊"導入"按鈕
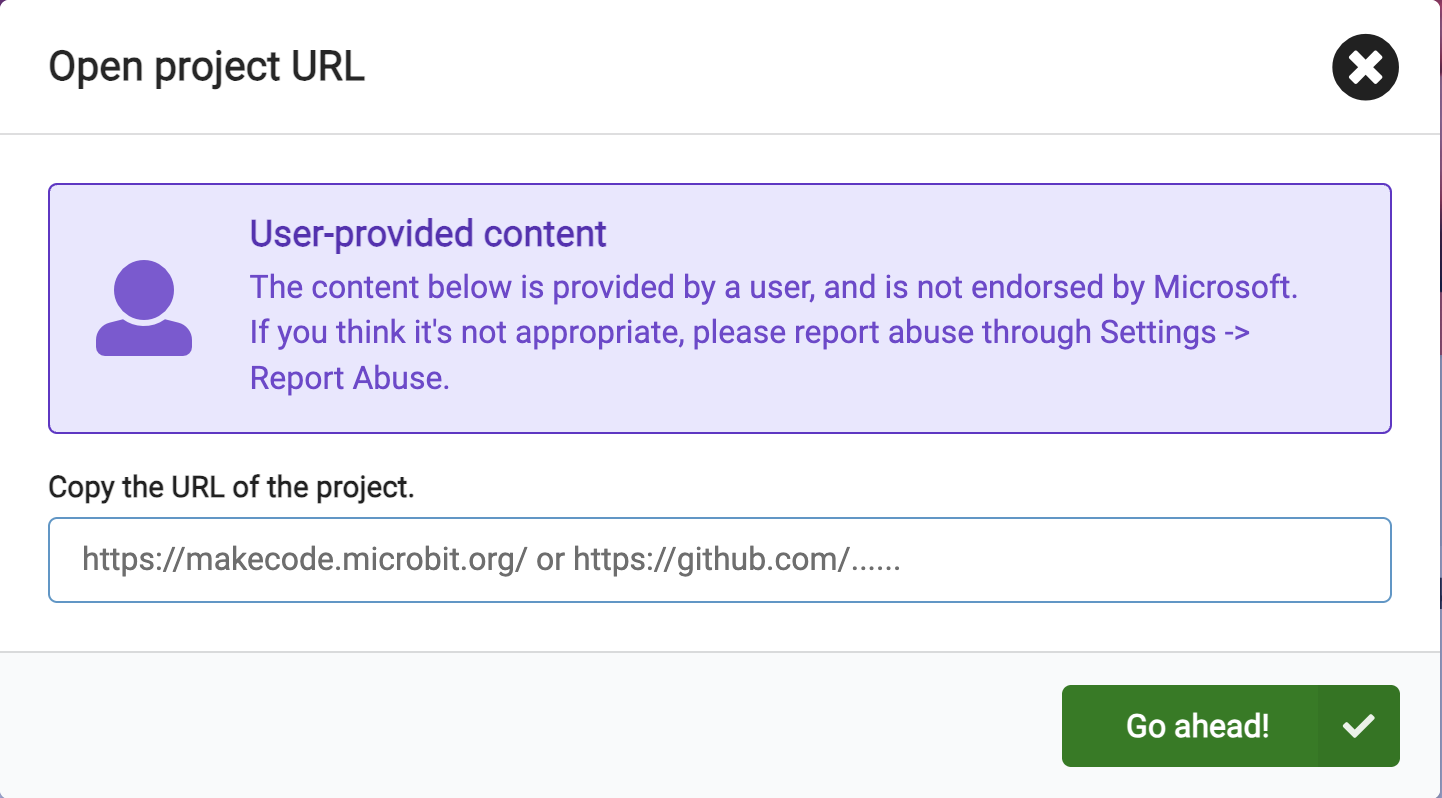
- 選擇"導入 URL"
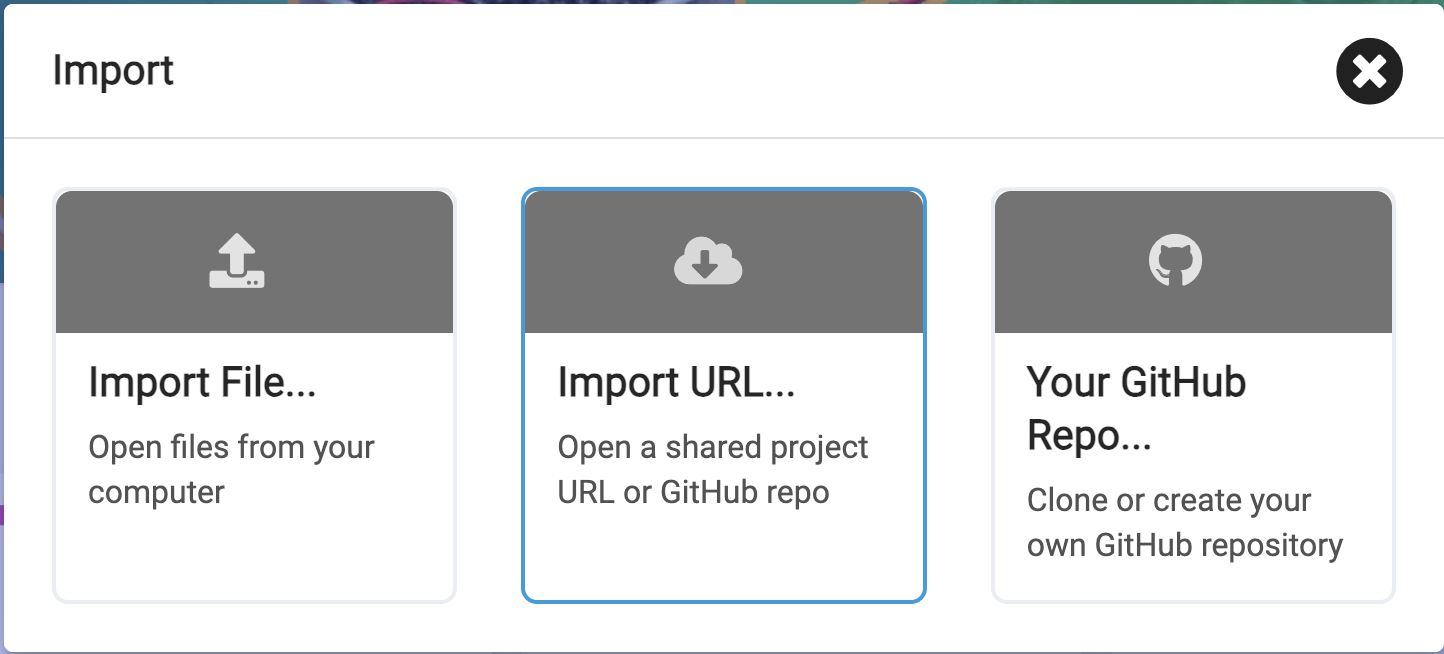
3. 打開項目 URL,輸入:https://github.com/beets3d/b3d1-walking-bot-main
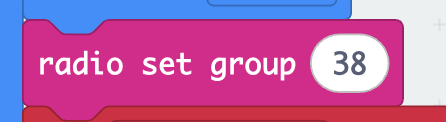
請注意: 如果您使用多於一個步行機器人,您應該為“無線電設置組”分配唯一的編號。組號可以是從 0 到 255。請記得在下一節的遙控器中也更改這個設置。
- 使用 USB 線連接您的 micro:bit,然後點擊"下載"
2.2 遙控器設置¶
重複上述步驟,使用此項目 URL:https://github.com/beets3d/b3d1-walking-bot-controller
3. 測試和校準¶
視頻說明
注意事項¶
- 在組裝過程中,請確保遵循安全指導。
- 測試每個步驟,確保所有部件正常運作。